
מוצרים
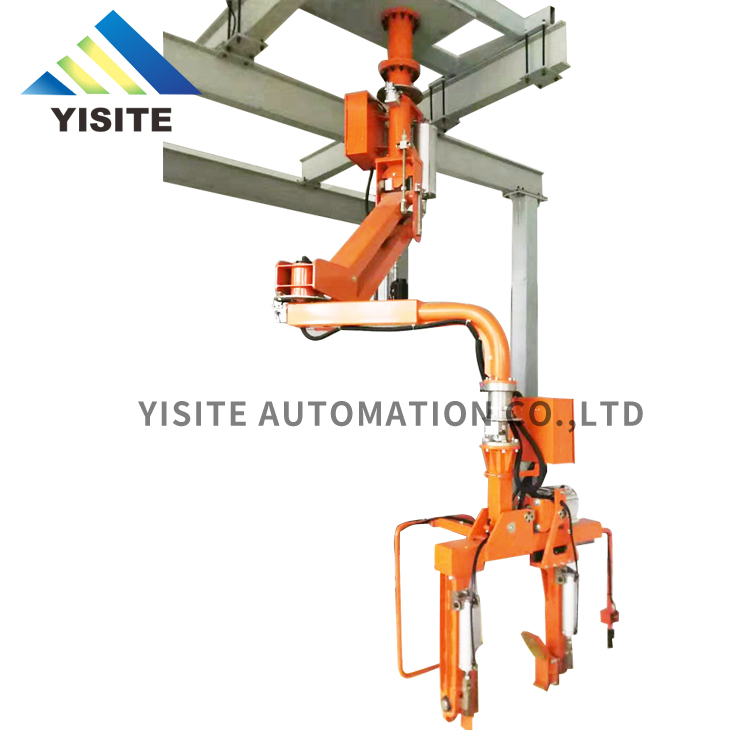


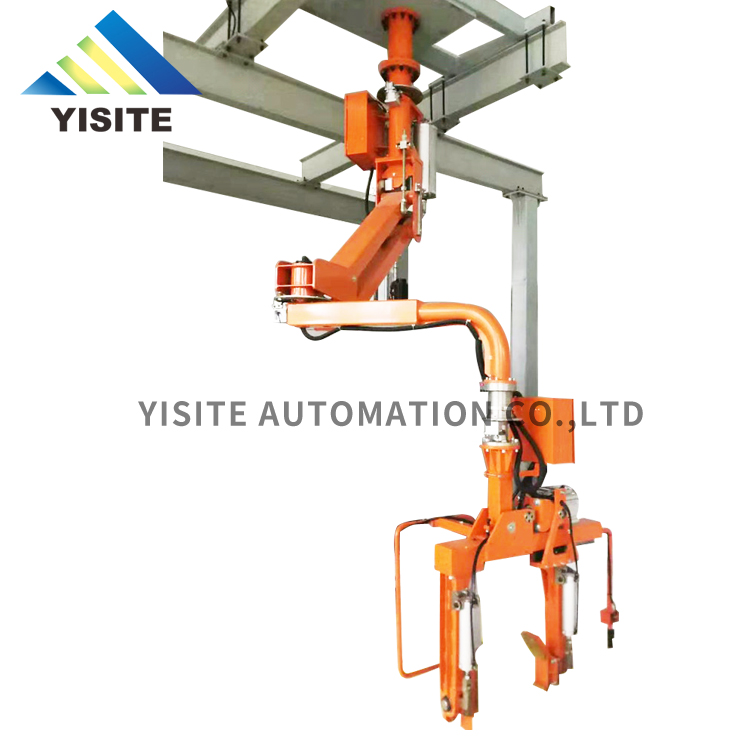
מניפולטור מנופי השעיה
תיאור קצר:
מניפולטור מאיץ ההשעיה מורכב מבסיס ההתקנה, מארח ומוט זרוע פלדה, מתקן. ניתן לסובב את הזרוע הראשית 360 מעלות, את מוט הזרוע השניה ניתן לסובב 270 מעלות כדי להשיג את טווח העבודה של כיסוי, והסיבוב יכול להוסיף את מנגנון בלם. מתאים לטיפול בתדר גבוה, מיקום, הרכבת רכיבים ואירועים אחרים.



עלינו

אנחנו יצרן ציוד אוטומציה מקצועי מותאם אישית. המוצרים שלנו כוללים פירוק משטחים, מכונת אריזה לאיסוף ומקום, פלטיזר, יישומי אינטגרציה של רובוטים, מניפולטורים של טעינה ופריקה, יצירת קרטונים, איטום קרטון, מחלק משטחים, מכונת עטיפה ופתרונות אוטומציה אחרים לקו ייצור אריזה אחורית.
שטח המפעל שלנו הוא כ-3,500 מטרים רבועים. לצוות הטכני הליבה יש ניסיון של 5-10 שנים בממוצע באוטומציה מכנית, כולל 2 מהנדסי תכנון מכני. מהנדס תכנות אחד, 8 עובדי הרכבה, 4 איש ניפוי באגים לאחר מכירה ועוד 10 עובדים
העיקרון שלנו הוא "לקוח ראשון, איכות תחילה, מוניטין קודם", אנו תמיד עוזרים ללקוחותינו "להגדיל את כושר הייצור, להפחית עלויות ולשפר איכות" אנו שואפים להפוך לספק מוביל בתעשיית האוטומציה של המכונות.
מאפייני המוצר
על ידי זיהוי כוס היניקה או קצה המניפולטור ואיזון לחץ הגז בצילינדר, הוא יכול לזהות אוטומטית את העומס על הזרוע המכנית, ולהתאים אוטומטית את לחץ האוויר בצילינדר דרך מעגל הבקרה הלוגיקה הפנאומטית, כדי להשיג את מטרת איזון אוטומטי. כאשר הוא עובד, חפצים כבדים הם כמו תלויים באוויר, מה שיכול למנוע התנגשות של עגינה של המוצר. בטווח העבודה של הזרוע המכנית, המפעיל יכול בקלות להזיז אותה אחורה, שמאלה ומטה לכל מקום מיקום, והאדם עצמו יכול לפעול בקלות. במקביל, למעגל הפנאומטי יש גם פונקציות הגנת שרשרת כגון מניעת אובדן חפץ בשוגג והגנה מפני אובדן לחץ

עקרון העבודה והמצב של מניפולטור כוח ההשעיה:
על ידי זיהוי כוס היניקה או קצה המניפולטור ואיזון לחץ הגז בצילינדר, הוא יכול לזהות אוטומטית את העומס על הזרוע המכנית, ולהתאים אוטומטית את לחץ האוויר בצילינדר דרך מעגל הבקרה הלוגיקה הפנאומטית, כדי להשיג את מטרת איזון אוטומטי. בעת עבודה, חפצים כבדים הם כמו תלויים באוויר, מה שיכול למנוע התנגשות של עגינה של המוצר. בטווח העבודה של הזרוע המכנית, המפעיל יכול בקלות להזיז אותה אחורה, שמאלה ומטה לכל עמדה , והאדם עצמו יכול לפעול בקלות. במקביל, למעגל הפנאומטי יש גם פונקציות הגנת שרשרת כגון מניעת אובדן חפץ בשוגג והגנה מפני אובדן לחץ
תכונות
מטען מקסימלי. 900 ק"ג
רדיוס פעולה מקסימלי: 4500 מ"מ
נסיעות אנכיות: 0.5 מטר/דקה
מערכת בקרה: 2200 מ"מ
מערכת בקרה: אוויר פנאומטי מלא
לְסַפֵּק: אוויר דחוס (40 מיקרומטר), אינו מכיל שומן
לחץ עבודה: 0.7 ÷ 0.8 MPa
טמפרטורת עבודה: +0° ל +45° C
רַעַשׁ:צריכת אוויר: 100 Nl ÷ 400 N למחזור
רוֹטַציָה: פיר עמוד ומתקן סיבוב רציף 360°, פיר אמצעי סיבוב רציף 300°







