
רובוט הגאנטרי מורכב ממסגרת עמודה, רכיב ציר X, רכיב ציר Y, רכיב ציר Z, מתקן ותיבת בקרה.
זהו ציוד תעשייתי אוטומטי לחלוטין המבוסס על מערכת הקואורדינטות התלת מימדית מלבנית X, Y, Z, שיכולה להתאים את מיקום היצירה או לממש את תנועת המסלול של חומר העבודה. ליבת הבקרה שלו מיושמת באמצעות בקרים תעשייתיים.
הבקר מנתח ומעבד אותות קלט שונים, עורך שיפוטים לוגיים, ולאחר מכן מוציא פקודות ביצוע לכל רכיב פלט כדי להשלים את התנועה המשותפת בין צירי X, Y ו-Z ולממש סט שלם של תהליכי פעולה אוטומטיים לחלוטין.
הוא משמש בהרכבה והובלה של מוצרים, במערכות מסועים ובאתרי עבודה בלתי מאוישים. זה יכול לשמש כציוד היקפי חשוב לאחסון ולוגיסטיקה זמניים וניתן להתאים אותו בצורה גמישה לציוד מארח לשימוש קל. תעשיות יישומים המעורבות ב: הרכבה סופית, תת-הרכבה, עיבוד, בדיקה, איתור באגים והובלה של מוצרים וכדומה.
תכונות המוצר נועדו לסייע ללקוחות לפתור את הבעיות של יעילות נמוכה או סיכוני טיפול גבוהים בסוגים שונים של טיפול בחומרים, על מנת להפחית בצורה נוחה ומהירה את סיכוני הטיפול, לחסוך זמן, מאמץ, לחסוך בעבודה ואף להחליף עבודה.
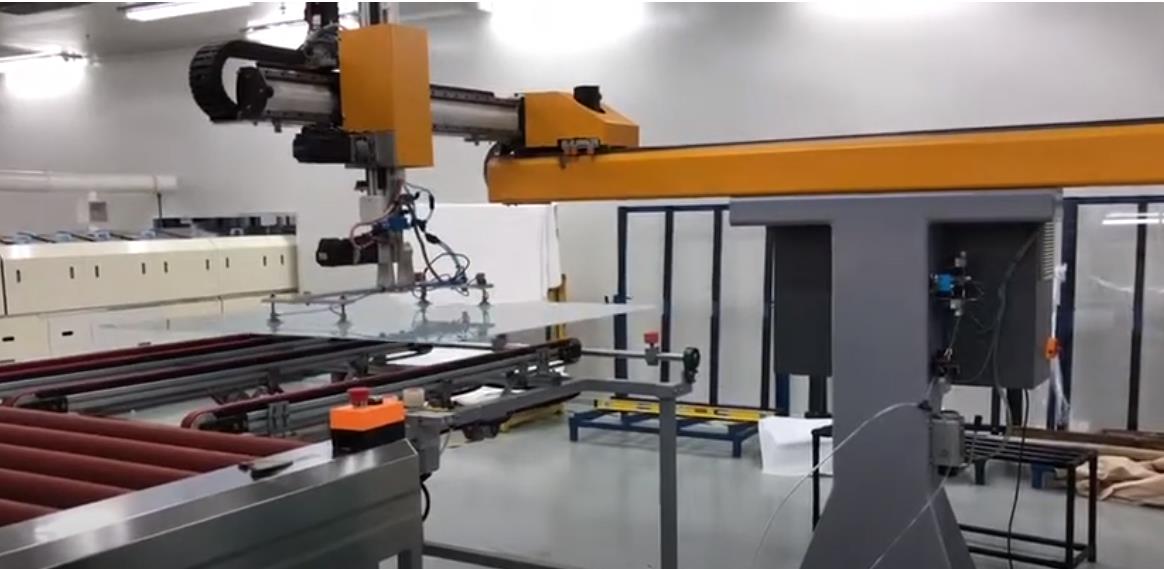
 מכשיר לטיפול במניפולטור מסבך זה לזכוכית כולל עמודים וקורות צולבות המותקנות על העמודים. הקורות הצולבות מותקנות עם מסילות החלקה. מסילות ההחלקה מותקנות עם מתקן הזזה רוחבי. מתקן ההזזה הרוחבי מותקן עם מתקן הזזה אנכי ומתקן כוס יניקה פניאומטי. ניתן לממש את זה מנגנון ההובלה נע בנקודה קבועה בחלל התלת מימדי, שואב את הכוס דרך כוס היניקה, תחילה נע לרוחב על ציר ה-X, לאחר מכן הפוך 90 מעלות למיקום המיועד, ולאחר מכן לנוע למעלה ולמטה על ציר ה-Y. לאחר הגעת למצב המוגדר, שחרר את הזכוכית והנח אותה על מדף הזכוכית. היציבות המבנית של המכשיר כולו גבוהה מאוד, מה שמשפר מאוד את הטיפול. יְעִילוּת.
מכשיר לטיפול במניפולטור מסבך זה לזכוכית כולל עמודים וקורות צולבות המותקנות על העמודים. הקורות הצולבות מותקנות עם מסילות החלקה. מסילות ההחלקה מותקנות עם מתקן הזזה רוחבי. מתקן ההזזה הרוחבי מותקן עם מתקן הזזה אנכי ומתקן כוס יניקה פניאומטי. ניתן לממש את זה מנגנון ההובלה נע בנקודה קבועה בחלל התלת מימדי, שואב את הכוס דרך כוס היניקה, תחילה נע לרוחב על ציר ה-X, לאחר מכן הפוך 90 מעלות למיקום המיועד, ולאחר מכן לנוע למעלה ולמטה על ציר ה-Y. לאחר הגעת למצב המוגדר, שחרר את הזכוכית והנח אותה על מדף הזכוכית. היציבות המבנית של המכשיר כולו גבוהה מאוד, מה שמשפר מאוד את הטיפול. יְעִילוּת.

זמן פרסום: 18-3-2024



