
מוצרים

פלטיזר אוטומטי של קופסא קרטון
תיאור קצר:
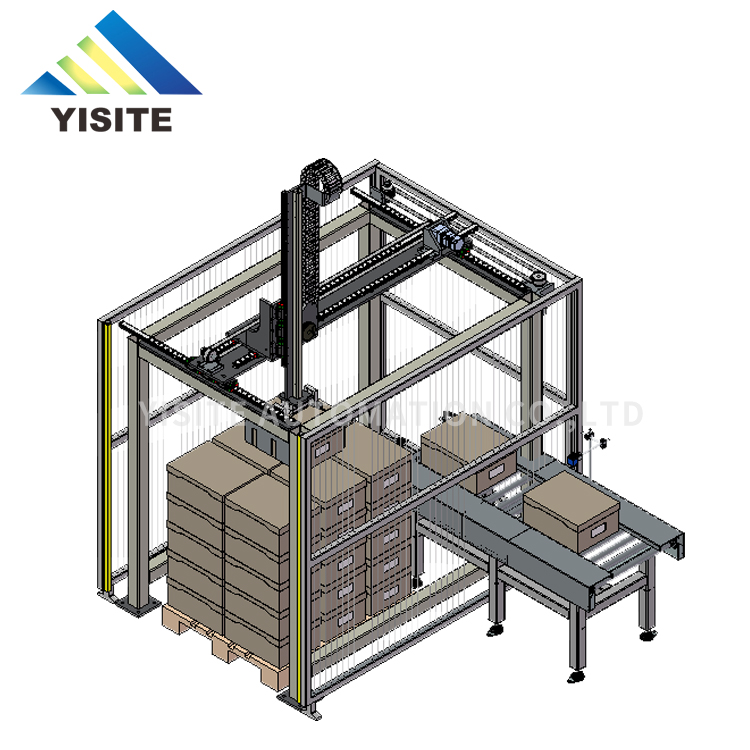
היכרות עם מוצר משטחי משטחים אוטומטיים בקופסת קרטון: היחידה הראשית של המשטח מורכבת מעגלה שיכולה לנוע קדימה ואחורה, מסגרת ופלטפורמת מנשא הניתנת להרמה למעלה ולמטה. ניתן להתאים את הגודל והמתקן.
פלטיזר אוטומטי של ארגז קרטון הוא עם עיצוב מיוחד של אחיזה פנאומטית, לחץ מתכוונן, מצויד בשסתום חיץ לחץ, כך שפעולת האחיזה המצוידת במנגנון אינדוקציה יכולה לתפוס את האובייקט באופן אוטומטי ולהודיע למרכז הבקרה על אחיזת האובייקט.

עלינו

אנחנו יצרן ציוד אוטומציה מקצועי מותאם אישית. המוצרים שלנו כוללים פירוק משטחים, מכונת אריזה לאיסוף ומקום, פלטיזר, יישומי אינטגרציה של רובוטים, מניפולטורים של טעינה ופריקה, יצירת קרטונים, איטום קרטון, מחלק משטחים, מכונת עטיפה ופתרונות אוטומציה אחרים לקו ייצור אריזה אחורית.
שטח המפעל שלנו הוא כ-3,500 מטרים רבועים. לצוות הטכני הליבה יש ניסיון של 5-10 שנים בממוצע באוטומציה מכנית, כולל 2 מהנדסי תכנון מכני. מהנדס תכנות אחד, 8 עובדי הרכבה, 4 איש ניפוי באגים לאחר מכירה ועוד 10 עובדים
העיקרון שלנו הוא "לקוח ראשון, איכות תחילה, מוניטין קודם", אנו תמיד עוזרים ללקוחותינו "להגדיל את כושר הייצור, להפחית עלויות ולשפר איכות" אנו שואפים להפוך לספק מוביל בתעשיית האוטומציה של המכונות.
מסבך XYZ מניפולטור ערימת קרטון בוס אוטומטי לחלוטין
1. הרכב מכונת הערימה
מכונת המשטחים מורכבת ממסגרת התקנה, מערכת מיקום, מערכת הנעת סרוו, מערכת בקרה, מערכת בקרה והפצה חשמלית, התקן הגנה בטיחותי וכו', מצוידת במערכת מיקום הזנה אוטומטית. (מערכת אספקת ערימה אוטומטית אופציונלית)
2. מתלה הרכבה למכונת ערימה
מכיוון שמהירות התנועה של הערימה מהירה מאוד, למצב ההתחלה יש השפעה רבה על מסגרת ההרכבה. מסגרת ההתקנה חייבת להיות קשיחה טובה מאוד כדי להבטיח את הפעולה היציבה של הערימה, לכן תכננו את מבנה מסגרת הפלדה המרותכת בתור מסגרת התמיכה.
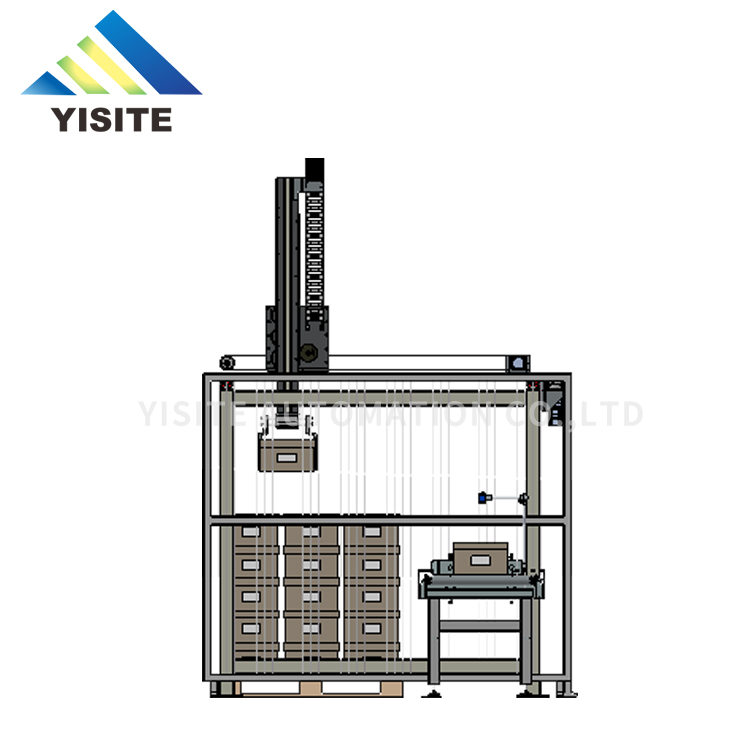
3. מערכת מיקום מכונת משטחים מחסנית
מערכת מיקום מערם היא הליבה של כל הציוד, היא תוצר של חברת Yaskawa (יפן), מהירות תנועה מהירה, ודיוק החזרות גבוה, X, Y, Z נבחרות שלוש קואורדינטות להעברת חגורת שיניים סינכרונית, קואורדינטה אחת דיוק המיקום החוזר הוא 0.1 מ"מ, מהירות תנועת קו מהירה: 1000 מ"מ/שנייה. ציר ה-X הוא מערכת מיקום יחידה באורך בודד של 3000 מ"מ וטווח של 1935 מ"מ. המשדר הסינכרוני מבטיח את התנועה הסינכרונית של שתי מערכות המיקום והוא מונע על ידי מנוע סרוו של 1500W. לצורך התאמת מומנט ההנעה ואינרציה, קיים מפחית הילוכים פלנטרי ברמת דיוק גבוהה.
ציר Y באמצעות מערכת מיקום כפולה. הסיבה לכך שיחידת המיצוב עם חתך כל כך גדול היא בעיקר בגלל שציר ה-Y הוא תומך כפול עם מבנה המתלה האמצעי. אם החתך הנבחר אינו מספיק, יציבות תנועת הרובוט לא תובטח, והרובוט ירעד בעת תנועה במהירות גבוהה. שתי יחידות מיקום משמשות זו לצד זו כדי לחתוך את ציר ה-Z באמצע ולאזן העומס היטב. למצב התקנה זה יש יציבות טובה מאוד. שתי מערכות המיקום מונעות על ידי מנוע סרוו של 1500W, המצויד במפחית הילוכים פלנטרי בעל דיוק גבוה להתאמת מומנט ההנעה ואינרציה.
מערכת המיקום של ציר Z היא יציבה ויציבה. למוצר יש בדרך כלל את המחוון קבוע ואת התנועה הכללית למעלה ולמטה. מנוע הסרוו צריך לשפר את האובייקט במהירות, שצריך להתגבר על כוח הכבידה וההאצה הגדולים, וזקוק לכוח גדול יותר .בפועל בחרנו במנוע סרוו 2000W המצויד במפחית הילוכים פלנטרי בעל דיוק גבוה. ציר A הוא ציר הסיבוב.
4. מערכת הנעה סרוו
מכונת מניפולטור הערימה באמצעות מנוע סרוו עם פונקציה דיגיטלית. פיר מנוע מצויד במנוע סרוו ומפחית, ארבעה מנוע סרוו וארבעה מפחית, כולל מנוע אנכי עם מנוע סרוו נעילה.
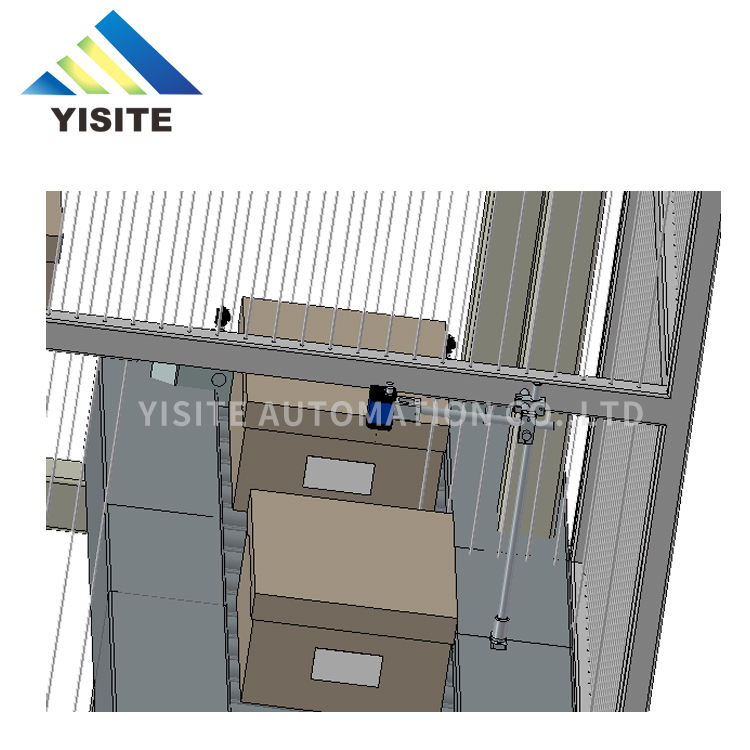
5. אחיזת מערם
הערימה עם עיצוב מיוחד של אחיזה פנאומטית, לחץ מתכוונן, מצויד בשסתום חיץ לחץ, כך פעולת האחיזה מצוידת במנגנון אינדוקציה, יכולה לתפוס אוטומטית את האובייקט, וליידע את מרכז הבקרה עבור אחיזת האובייקט.
6, מערכת בקרה
מערכת הבקרה מורכבת מ-PLC גדול ומסך מגע. למערכת יכולות תכנות חזקות. עם דגמים שונים של פלטיזציה, המערכת יכולה להגדיר מראש מגוון תוכניות חפצים, ולהחליף את התוכנית המתאימה ניתן להפעיל על מסך המגע.
7, התקן בטיחות
למכונה יש פונקציית הודעה תקלה ואזעקה, וכל תקלה יכולה לשקף במדויק את המיקום הספציפי, קל ומהיר לביטול תקלות, כולל בעיקר: פונקציית הגנה מפני התנגשות רובוט; התקנת חלקי עבודה במקום זיהוי; הגנה על מסך קל.
פרמטרים טכניים
1. דגם מכונה: YST-MD1500
2. קיבולת הערמה: 200-500 קופסאות / ח'
3. מסגרת: SS41 (טיפול פלסטי בהזרקת פלדה A3) מיסב גל S45C
4. מתח: AC, תלת פאזי, 380V, 9KW 50HZ
5. צריכת אוויר: 500NL/MIN (שימוש באוויר: 5-6 ק"ג/סמ"ר)
6. מידות הציוד: (L) 3500 מ"מ (W) 2250 מ"מ (H) 2800 מ"מ (תלוי בתכנון הפריסה בפועל)
7. משקל הציוד: 1,500 ק"ג


תצורת יתרון עיקרי
1. מנוע סרוו של מותג Yaskawa
2. מפחית מהירות של מותג טייוואן
3. מיצובישי (יפן) PLC
4. בשניידר ישמש מגע ומתגים
5. חיישן פוטו-אלקטרי של אומרון
6. פעולת תצוגת בקרת ממשק ומצב אזעקה ופונקציית אזעקה
7. ממיר תדרים של מותג Yaskawa
8. המסגרת והפנלים הצדדיים עשויים פלדת פחמן
9. טייוואן AirTac אלמנטים פניאומטיים
10. מותג PIAB האיטלקי Sucker









